DEFINICIÓN
VARIADOR DE FRECUENCIA
Un variador de frecuencia (VFD, del inglés: Variable Frequency Drive o AFD Adjustable Frequency Drive) es un conjunto de circuitos que sirve para controlar la velocidad rotacional de un motor de corriente alterna (CA), mediante el control de la frecuencia de alimentación que se suministra al motor.
VARIACIÓN DE VELOCIDAD
La variación de velocidad es ampliamente utilizada a nivel industrial en diversos procesos y en maquinaria, de grandes, medianas y bajas potencias.
Para su correcta aplicación se requiere en la mayoría de los casos de un par mantenido, sin causar cambios significativos en la variación de velocidad.
En los motores trifásicos de corriente alterna, en este caso, en un motor de tipo jaula de ardilla, su velocidad es fija y no tiene posibilidad de variación. Su valor viene dado por la fórmula que se muestra a continuación:
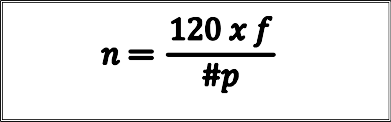
Dónde:
n – revoluciones por minuto
La velocidad real del motor siempre será inferior a la obtenida con esta fórmula, ya que en los motores asíncronos (Trifásicos) existen perdidas como consecuencia del deslizamiento y de causas eléctricas y mecánicas.
f – Frecuencia
#p- Número de polos del motor
En este tipo de motores se consigue variar la velocidad, variando la frecuencia de alimentación del motor. Al variar la frecuencia de entrada, el motor, sufre un cambio sustancial de sus condiciones eléctricas, lo que desencadena un reajuste en sus otros parámetros, principalmente en la tensión.
Funcionamiento Interno:
- Primero la señal eléctrica de la fuente de alimentación es recibida por el variador de frecuencia.
- Posteriormente dicha señal es convertida a corriente directa con el circuito rectificador.
- Por último, con el circuito inversor convierte nuevamente a corriente alterna, pero haciendo los debidos ajustes para obtener la frecuencia de salida que uno desea.
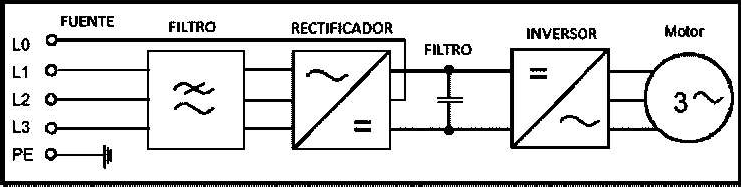
Figura 1. Diagrama Funcionamiento Básico Variador [1]
Los variadores de frecuencia trabajan entre una frecuencia mínima y una máxima, pudiéndose regular dicha frecuencia en todo el rango con facilidad. Dichos VFD se usan en su mayoría en los motores de jaula de ardilla, debido a que estos motores presentan las ventajas de estandarización, bajo costo, estanqueidad y poco o nada de mantenimiento.
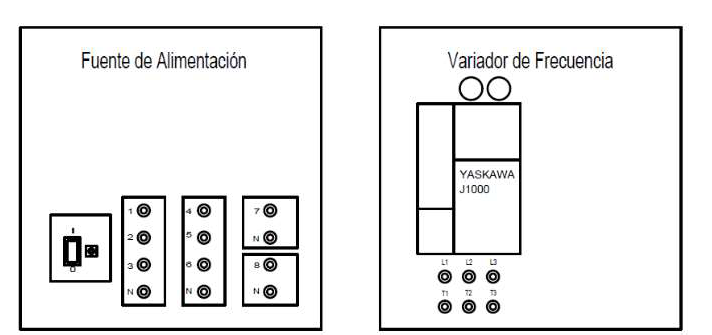
Yaskawa J100
El Variador de Velocidad Yaskawa J1000 reúne todos los requisitos de automatización y control para desempeñarse satisfactoriamente en aplicaciones compactas con procesos que necesiten velocidades variables y contiene características muy específicas que contribuyen en el ahorro de energía. Una gran variedad de funciones que son muy útiles, actualizan su máquina con respecto a sus predecesores y le ofrecen un gran potencial en la operación.

Figura 2. Variador Yaskawa J1000[2]
- Semana 6: El Variador de Velocidad. (2018, 29 marzo). Mi Senati Villa El Salvador. https://misenatives.wordpress.com/semana-6-el-variador-de-velocidad/
- Legacy Drives. (s. f.). https://www.yaskawa.es/productos/ac-drives/legacy- drives/seriesdetail/serie/serie-j1000_516
APLICACIONES
En el mercado encontramos diferentes tipos de variadores, por lo que su elección está estrechamente relacionada con el uso en el que se va a emplear, entre las aplicaciones más comunes encontramos las siguientes:
PAR CONSTANTE
La mayoría de las máquinas que se usan actualmente en la industria son de par constante. Esto quiere decir, que el par no de pende de la velocidad, y que al arrancar vamos a tener un sobrepar inicial mayor al par nominal. Ejemplos: Grúas, alimentadores y transportadoras.
PAR CRECIENTE LINEALMENTE CON LA VELOCIDAD
En este tipo máquinas el par varía de manera directamente proporcional con la velocidad. Y a su vez, La potencia varía al tiempo que crece o decrece el cuadrado de la velocidad. Ejemplo: Mezcladoras.
PAR CRECIENTE CON EL CUBO DE LA VELOCIDAD
Para esta aplicación el par varia con el cuadrado de la velocidad. Y la potencia lo hace con el cubo de la velocidad. Ejemplos: Las bombas centrífugas y los ventiladores.
POTENCIA CONSTANTE
Se da en máquinas donde la potencia requerida es independiente de la velocidad. Se requiere menor par y por lo tanto se puede utilizar un accionamiento menor. Ejemplos: funcionamiento propio de las máquinas herramientas y sistemas de arrollamiento (Bobinador y desbobinador)

Figura 3. Aplicaciones J1000
- YASKAWA, C. D. F. SERIE J1000.
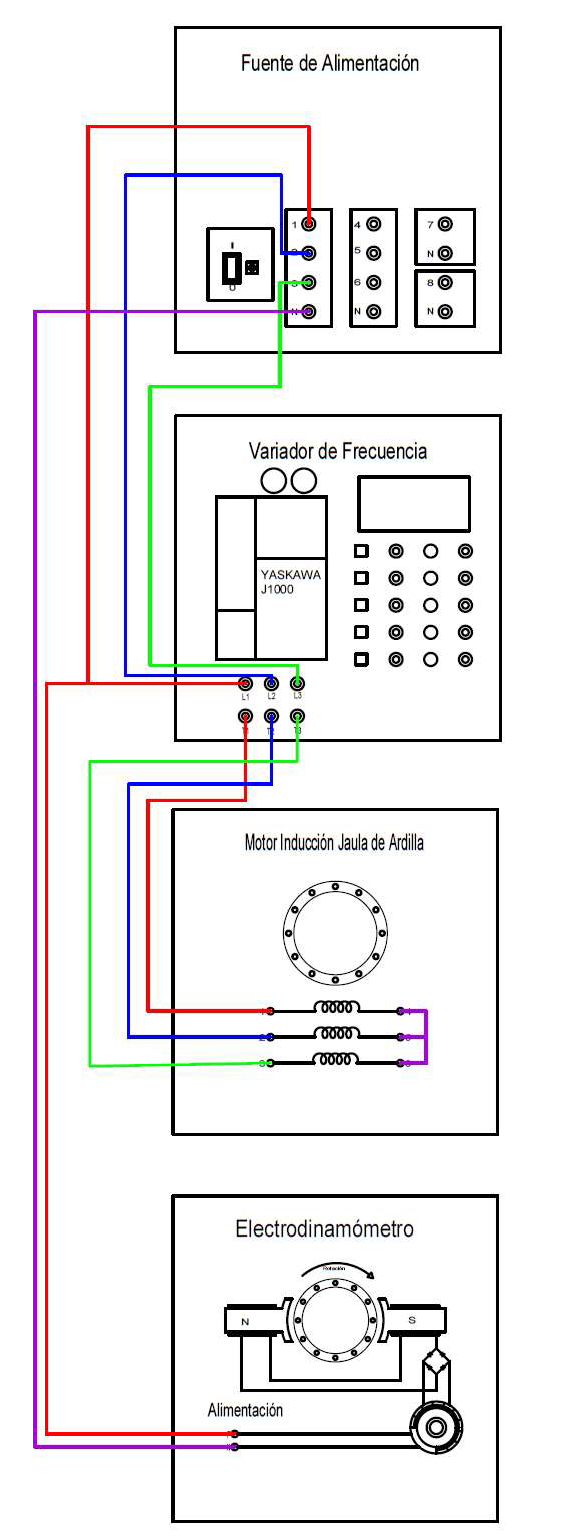
EQUIPO DE TRABAJO

CONEXIONES PRÁCTICAS 1 A 5